231
Movimientos en una y dos dimensiones
Ecuación de posición en el movimiento rectilíneo
con aceleración constante
Para deducir de un modo simple la ecuación de posición en un movimiento rectilí-
neo con aceleración constante, haremos uso de un sencillo teorema conocido como
teorema de la velocidad media
o
teorema de Merton,
desarrollado en el siglo
xiv
por matemáticos de Oxford y París.
En esencia, este teorema viene a decir que si el área encerrada bajo la gráfica ve-
locidad-tiempo representa el desplazamiento o espacio recorrido, entonces, como
se aprecia en la figura 10.9, el desplazamiento en un movimiento con aceleración
constante cuya velocidad varía uniformemente entre los valores
v
0
y
v
es exactamente
el mismo que el que se recorrería con la velocidad promedio entre
v
0
y
v
.
Es decir:
v
m
=
v
0
+
v
2
Partiendo de esta idea, podemos deducir la ecuación de posición a partir de:
Δ
x
=
v
m
Δ
t
⇒ Δ
x
=
v
0
+
v
2
Δ
t
Teniendo en cuenta la expresión deducida para la velocidad y sustituyéndola en la
expresión anterior, se obtiene (suponiendo
t
0
=
0):
Δ
x
=
v
0
+
v
0
±
at
(
)
2
t
⇒
x
−
x
0
=
v
0
t
±
1
2
at
2
Por tanto, la
expresión
más general para la
posición
x
en función del
tiempo,
en un movimiento rectilíneo con aceleración constante, es:
x
=
x
0
±
v
0
t
±
1
2
at
2
Como criterio general en cuanto al empleo de los signos de
v
0
y
a,
consideraremos que:
❚❚
Ambos son positivos si tienen el mismo sentido que
x
0
(alejandose del observador).
❚❚
Ambos son negativos en el caso contrario (acercándose hacia el observador).
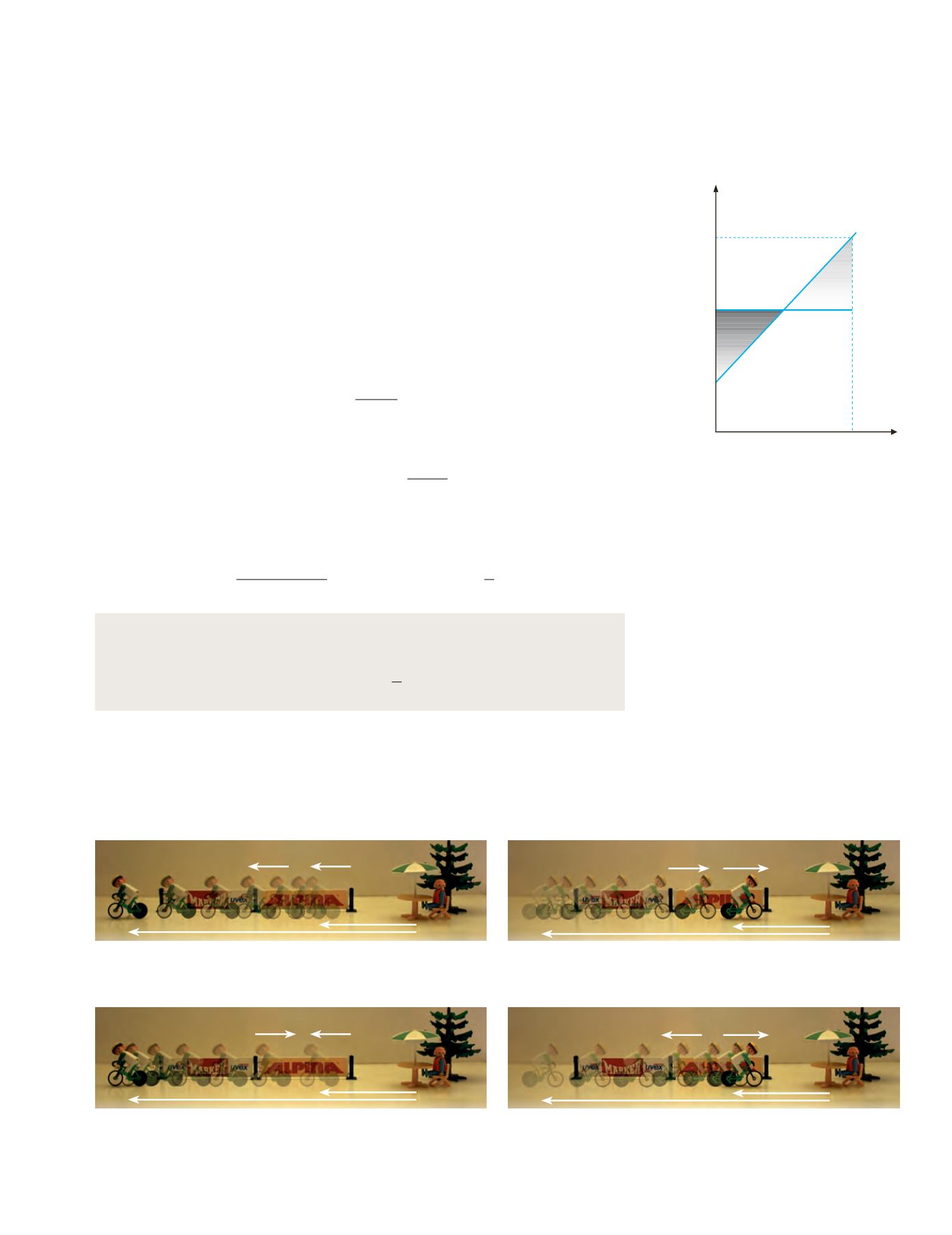
Puedes observar el empleo de signos en los distintos casos de las figuras 10.10:
velocidad
tiempo
v
=
m
_____
v
0
+
v
2
v
0
v
t
velocidad media
Figura 10.9.
El área encerrada bajo la
recta
v
m
tiene el mismo valor que el área
encerrada bajo la recta que va de
v
0
a
v
.
Figura 10.10.a.
El ciclista parte de la posición inicial
x
0
y se aleja del
observador acelerando. La ecuación representativa de su posición respecto
del observador es, en este caso,
x
=
x
0
+
v
0
t
+
1/2
at
2
.
x
0
a
v
0
x
a)
Figura 10.10.b.
El ciclista parte de la posición inicial
x
0
y se aleja del
observador frenando. La ecuación representativa de su posición respecto
del observador es, en este caso,
x
=
x
0
+
v
0
t
−
1/2
at
2
.
x
0
a
v
0
x
b)
Figura 10.10.c.
El ciclista parte de la posición inicial
x
0
y se acerca hacia el
observador acelerando. La ecuación representativa de su posición respecto
del observador es, en este caso,
x
=
x
0
−
v
0
t
−
1/2
at
2
.
x
a
v
0
x
0
c)
Figura 10.10.d.
El ciclista parte de la posición inicial
x
0
y se acerca hacia el
observador frenando. La ecuación representativa de su posición respecto
del observador es, en este caso,
x
=
x
0
−
v
0
t
+
1/2
at
2
.
x
a
v
0
x
0
d)


